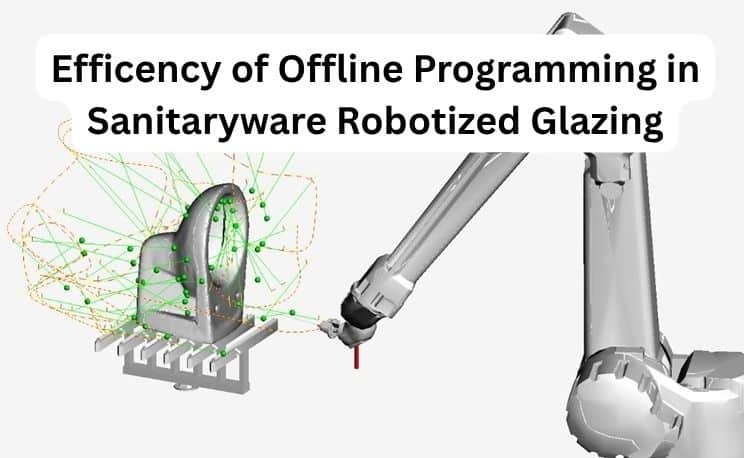
Efficency of Offline Programming in Sanitaryware Robotized Glazing
Venkatmani4 min read6,208 views
Robotic glazing of sanitaryware has become a key element in modern sanitaryware manufacturing, helping plants achieve consistent quality, stable production, and reduced manual dependency. However, the true efficiency of robotic glazing depends not only on automation, but on how the robot is programmed.
This has become a key element in modern sanitaryware manufacturing, helping plants achieve consistent quality, stable production, and reduced manual dependency, in comparison to point-to-point programs, which are quick to implement but result in high glaze wastage and longer cycle times. In contrast, offline programming, developed using optimized spray paths based on product geometry, offers measurable improvements in glaze utilization, time savings, and daily output. This article presents a practical case study from a sanitaryware glazing line, highlighting how offline programming delivers tangible benefits without additional capital hardware investment.
Programming Approaches in Robotized Glazing
In robotic glazing, two main programming approaches are commonly used, point-to-point and offline programming.
In the point-to-point approach, the robot follows generalized spray paths that are not fully synchronized with the exact geometry of the sanitaryware product. This is programmed by using manual glazing method. This is because the spray gun movement is more generic, overspray tends to be high, particularly around critical areas such as rims, trapways, and external outline. As a result, a significant portion of the glaze is wasted, as it ends up outside the piece rather than on the intended surface.
Offline programming, on the other hand, is developed using digital or 3D models of the sanitaryware product. This approach allows precise optimization of spray gun angles, spraying distances, and overlap patterns, along with accurate ON–OFF control of the glaze guns. The robot applies glaze only where it is required, closely following the product geometry and avoiding unnecessary spraying outside the piece. This leads to better glaze efficiency, improved coating uniformity, and reduced material loss.
Case Study: One-Piece WC Robotic Glazing Line
Production Conditions
- Product: One-piece (WC)
- Fully robotized glazing booth
- Operation:
- 8 hours per shift
- 3 shifts per day (24-hour operation)
Glaze Utilization: A Clear Difference
With a point-to-point program, nearly 60–65% of the glaze is sprayed outside the piece due to non-optimized spray paths.
With offline programming, overspray is reduced to 20–25%, meaning a much higher percentage of glaze remains on the sanitaryware surface.
Impact
- Reduced glaze consumption per WC
- Lower reclaim glaze volume
- Less load on reclaim filtration and pumping systems
- More stable glaze properties due to reduced recycling
This improvement becomes highly significant when applied to high-volume production and premium glaze compositions.
Cycle Time Reduction Through Offline Programming
Offline robot programming significantly reduces glazing cycle time for one-piece WCs when compared to point-to-point program. In a typical glazing operation, the point-to-point program requires 2 minutes 11 seconds per piece, while the offline program completes the same task in 1 minute 24 seconds. This results in a time saving of 47 seconds per piece, which has a direct and measurable impact on overall productivity.
Output per Day (3 Shifts)
| Programming Method | Pieces per Day |
| Point-to-Point Program | ~648 pieces |
| Offline Program | ~1,032 pieces |
Financial and Operational Impact
Offline programming delivers benefits across multiple cost centres:
- Reduced glaze consumption
- Improved consistency and surface quality
- Reduced downtime from shopfloor teaching
- Reduced scrap and rework
- Lower energy and maintenance load in reclaim systems
- Faster return on investment, often achieved without new hardware
Conclusion
Offline programming turns robotic glazing from simple automation into a precise, controlled, and cost-efficient manufacturing process. By allowing programs to be developed and optimized outside the production line, manufacturers can achieve better consistency, reduced waste, and smoother operations without interrupting daily output.
Key Takeaways
- With offline robot programming, glaze overspray can be reduced significantly, from around 60–65% down to 20–25%, resulting in major glaze cost savings.
- Cycle time per WC can drop by about 47 seconds per piece, directly improving line efficiency.
- Overall output can increase by nearly 60%, while also delivering higher productivity, better process stability, and more predictable quality.
For sanitaryware manufacturers aiming to cut costs and boost throughput without adding new capacity, offline robot programming stands out as a practical, proven, and scalable solution.
If you would like to try an offline programming solution that has been proven to work across multiple robot types, 3D-ProSim is here to support you. Please schedule a demo here – Improve Your Glazing Efficiency
3D‑ProSim is a professional offline programming solution for robotic glazing in sanitaryware production, enabling end‑to‑end programming of the glazing process through a no‑code workflow. It provides a high‑fidelity virtual model of the complete glazing cell, automatic trajectory generation, and detailed glazing simulation with thickness visualization, shifting robot programming from the shopfloor into a digital environment.
Share this article
Written by
Venkatmani
Ceramic industry professional & content contributor.
Leave a Comment
Add your comment
No comments yet. Be the first to share your thoughts!
Earlier read
Black Glossy Glaze Recipe for Sanitaryware Manufacturing
Next read
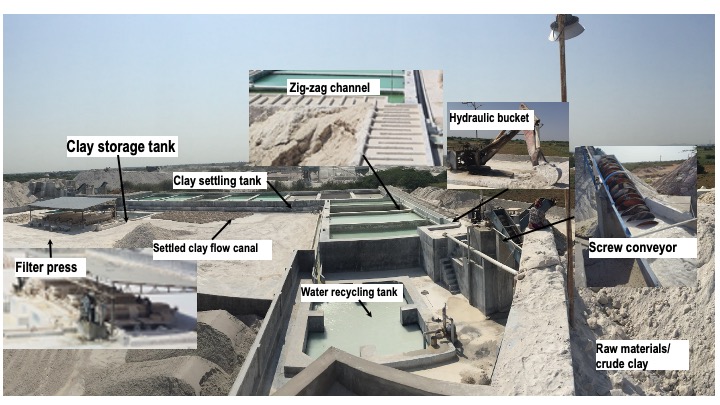
Levigated Clay: Levigation Process Steps of Crude Clay
Keep exploring
Practical articles, Buy/Sell listings, and jobs